研究紹介>バイク
バイク
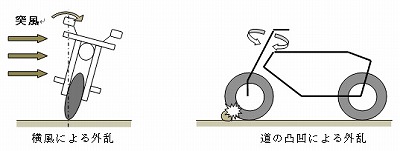
この研究テーマでは、二輪車(バイク)の運転を支援する制御システムを確立することを目的としています。バイクは構造上、不安定な乗り物であり走行速度や操縦者ごとに運動特性が大きく変わります。 走行中の突風や、道の凸凹のような障害に対しても安全にバイクを運転するためには、バイクに姿勢制御を施すことによって安全性の向上を図る必要があると言えます。
現在、研究の初期段階として操縦者の動きを考えず、制御装置によって車体の傾きとハンドルの角度を制御することで、低速時におけるバイクの自律走行の実現を目指しています。
この研究が進んでいくと自律走行するバイクが実現でき、さらに研究を進めることで誰が運転しても転倒しにくいバイクが実現できると考えられます。